top of page
: Harnessing Microbotic Technologies for Pediatric Surgery

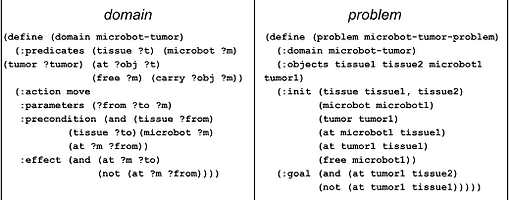
System Architecture

Our Pediabots will take in instructions from the surgeon and developers. After the logical models are passed to the server, a planning algorithm in the decision-making pipeline will search the space and make high-level decisions that are then translated into directives for the actuators on the microbots to pursue. Pediabots will leverage sensor fusion techniques to understand their situations. If the network is ever to become disconnected, a self-driving component kicks in, taking over operations.

bottom of page